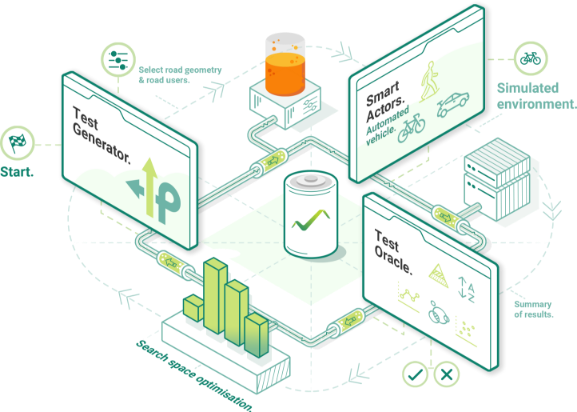

This paper, authored by the Connected Places Catapult, introduces the collaborative VeriCAV project and its modular approach to addressing this topic.
Specific challenging aspects related to the automation of testing, test scenario generation, and test analysis are outlined – together with potential solutions offered by the VeriCAV framework.